ad-refkit
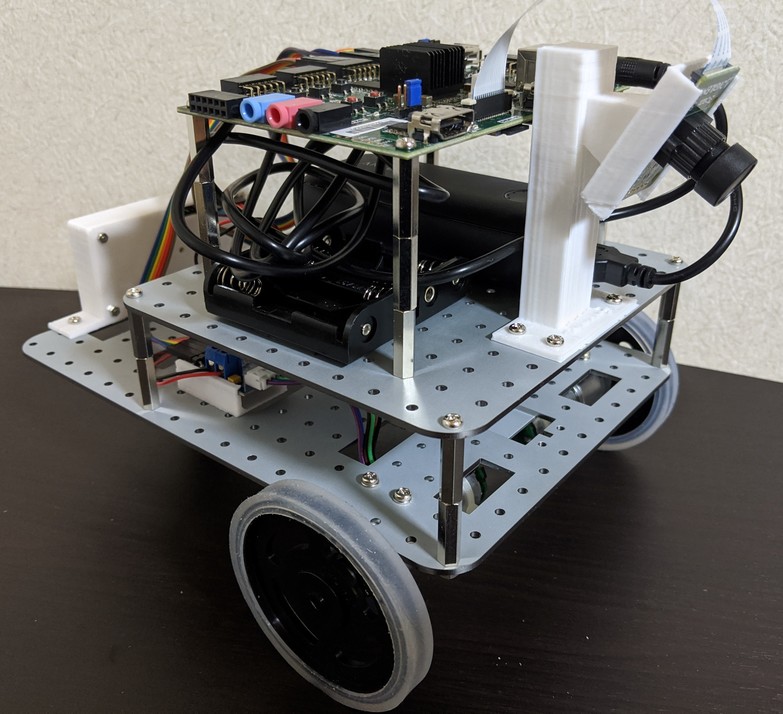
This ad-refkit is an FPGA-kit for FPGA design contests. This kit includes a set of required items to try the design published at GitHub, which is designed by Izumi Lab., Ritsumei University. Note that, Web-camera and USB-hub are not included in this kit because of not required for running along the white line of the course.
The design and required items are published at GitHub as open-source. If you are hesitant to get the items together, please use our kit.
Please refrain from contacting the Izumi Lab. regarding any problems with this kit.
Kit contents
The included items in this kit are listed below. Please note that some items will be changed within the range that does not hinder the operation.
FPGA Digilent Zybo Z7-20 Storage MicroSD card (16GB) Camera Digilent Pcam5C FPGA peripherals Digilent Pmod HB5: H-bridge Driver with Feedback Inputs Digilent DC Motor/Gearbox (1:53 Gear Ratio) Digilent Wheel Kit (D-slot Pair) Digilent Sticky Rubber Tires (Pair) Digilent Tail Skit Digilent Motor Mounter OLED character display module (16chars, 2lines) Power Mobile battery (Anker PowerCore 10000PD Redux) USB Type-A - DC-jack cable AAAx4 battery case Mechanicle Base chassis Middle level chassis Pcam5C mounter (printed by home 3D-printer) OLED mounter(printed by home 3D-printer) HB5 mounter(printed by home 3D-printer) Misc. Screws, Nuts Jumper cables Magnetic tape Price
EOL \84,800 JPY(excluding TAX.)
Purchasing or Inquiries
This product has been EOL. For
purchasing orinquiring about this kit, please contact the following.
ADT Co., Ltd. Contact to Sales/Support Mail : adt.ac.xilinx@adt.co.jp Tel : +81-3−5361−6680
Acknowledgment
This kit has been developed with the cooperation of Izumi Lab., Ritsumei University referred to the following paper. We appreciate that you refer to the following paper in your publication of the work with this kit.
Yuya Kudo, Atsushi Takada, Yuta Ishida, and Tomonori Izumi, "An SoC-FPGA-Based Micro UGV with Localization and Motion Planning", Proc. 2019 International Conference on Field-Programmable Technology, pp.469-472, DOI 10.1109/ICFPT47387.2019.00095, Dec.2019.